【手感装机篇】一台全新升级版适合新手的穿越机! ,模友之吧
內容出處: 【手感装机篇】一台全新升级版适合新手的穿越机! – 穿越机 – 模友之吧 – Powered by Discuz!
收集資訊
【手感装机篇】一台全新升级版适合新手的穿越机! ,模友之吧
內容出處: 【手感装机篇】一台全新升级版适合新手的穿越机! – 穿越机 – 模友之吧 – Powered by Discuz!
內容出處: 《老司機是怎樣練成的》之模擬器篇3 – 每日頭條
內容出處: 3/2 如何刷寫FrSky XM+固件
Frsky XM & XM+ 刷固件 使用rssi ,模友之吧
內容出處: Frsky XM & XM+ 刷固件 使用rssi – 穿越机 – 模友之吧 – Powered by Discuz!
Frsky XM+ plus刷固件 配合OSD使用rssi显示信号强度 ,模友之吧
內容出處: Frsky XM+ plus刷固件 配合OSD使用rssi显示信号强度 – 穿越机 – 模友之吧 – Powered by Discuz!
【外文翻译】F1,F3,F4飞控都是咋回事? ,模友之吧
內容出處: 【外文翻译】F1,F3,F4飞控都是咋回事? – 穿越机 – 模友之吧 – Powered by Discuz!
一般是这样子调节:
先逐渐增大P增益,调到振荡发生前的最大值,
再逐渐减小I增益,调节到振荡发生前的最大值,
最后逐渐增大D增益,调节到振荡发生前的最大值。
若比例增益大,在相同誤差量下,會有較大的輸出,但若比例增益太大,會使系統不穩定。相反的,若比例增益小,若在相同誤差量下,其輸出較小,因此控制器會較不敏感的。若比例增益太小,當有干擾出現時,其控制信號可能不夠大,無法修正干擾的影響

不同比例增益Kp下,受控變數對時間的變化(Ki和Kd維持定值)
积分控制考慮过去誤差,將误差值过去一段时间和(误差和)乘以一个正值的常数Ki。Ki从过去的平均误差值来找到系统的输出结果和预定值的平均误差。一个简单的比例系统会震盪,会在预定值的附近来回变化,因为系统无法消除多余的纠正。通过加上负的平均误差值,平均系统误差值就会漸漸减少。所以,最终这个PID回路系统会在設定值稳定下来。
積分控制會加速系統趨近設定值的過程,並且消除純比例控制器會出現的穩態誤差。積分增益越大,趨近設定值的速度越快,不過因為積分控制會累計過去所有的誤差,可能會使回授值出現過衝的情形。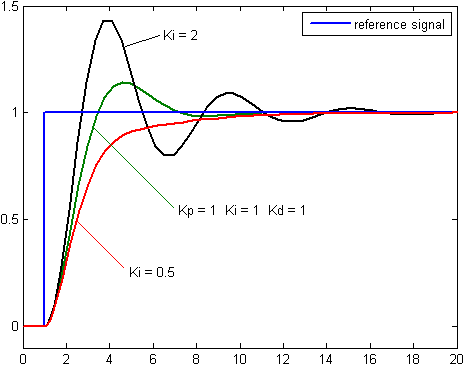
微分控制考慮将来誤差,计算误差的一阶导,并和一个正值的常数Kd相乘。这个导数的控制会对系统的改变作出反应。导数的结果越大,那么控制系统就对输出结果作出更快速的反应。这个Kd参数也是PID被称为可预测的控制器的原因。Kd参数对减少控制器短期的改变很有帮助。一些实际中的速度缓慢的系统可以不需要Kd参数。
微分控制可以提昇整定時間及系統穩定性[8][9]。不過因為純微分器不是因果系统,因此在PID系統實現時,一般會為微分控制加上一個低通濾波器以限制高頻增益及雜訊[10]。實际上較少用到微分控制,估計PID控制器中只有約20%有用到微分控制